June 2, 2026
Reinforcement Learning Through Energy Landscapes: A Visual, Intuitive Understanding of How…
Why Reinforcement Learning Feels Like Physics

Suraj Kumar
4 min read
When people first encounter Reinforcement Learning (RL), they are introduced to a wall of unfamiliar terminology:
- States
- Actions
- Policies
- Value Functions
- Bellman Equations
- Q-Tables
While these concepts are important, they often hide the most intuitive picture.
At its core, Reinforcement Learning can be viewed as a journey through an energy landscape.
Imagine placing a marble on a mountainous terrain.
The marble wants to roll toward lower energy regions.
An RL agent does something similar.
It explores a landscape of possible behaviors and gradually discovers pathways that lead to higher rewards.
Once you start viewing RL this way, many famous algorithms become surprisingly easy to understand.
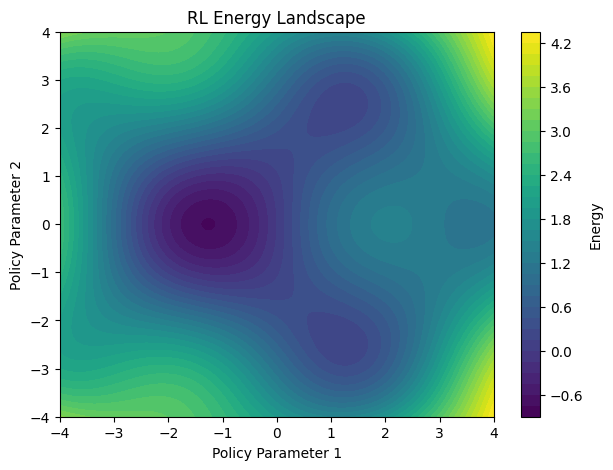
The Energy Landscape
Consider a landscape:
Each point represents a policy.
A policy is simply:
which means:
"Given state s, choose action a."
Some policies are poor.
Some are excellent.
The goal of RL is finding the highest-performing policy.
In optimization language:

where:

is the expected reward.
Visualizing the Landscape
Imagine a surface:
Low energy:
- High reward
High energy:
- Poor reward
Now learning becomes:
Bad Policy
↓
Exploration
↓
Better Policy
↓
Optimal PolicyBad Policy
↓
Exploration
↓
Better Policy
↓
Optimal PolicyThe agent is navigating a rugged terrain.
Random Search: Wandering Blindly
The simplest strategy is random exploration.
Imagine a hiker moving without a map.
import numpy as np
position = np.random.randn(2)
for step in range(100):
position += 0.1*np.random.randn(2)import numpy as np
position = np.random.randn(2)
for step in range(100):
position += 0.1*np.random.randn(2)The trajectory looks chaotic.
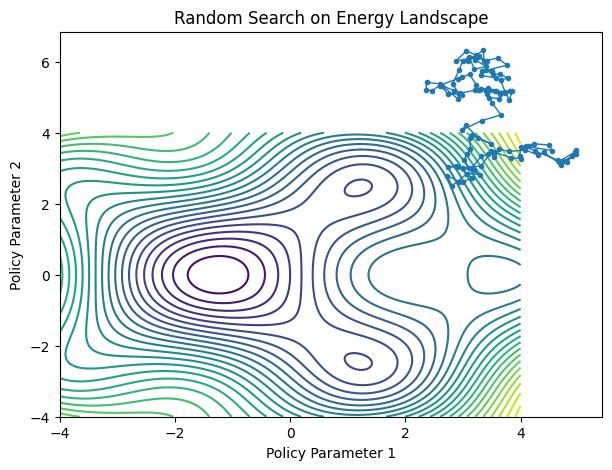
Eventually the hiker may discover a valley.
But it is inefficient.
Q-Learning: Building a Terrain Map
Q-Learning does something smarter.
Instead of wandering blindly, it builds a memory of the landscape.
The famous update rule:

means:
Update your estimate using what you learned from the future.
Over time:
Unknown Terrain
↓
Partial Map
↓
Accurate MapUnknown Terrain
↓
Partial Map
↓
Accurate MapThe agent learns where the valleys are.
Gradient-Based Policy Learning
Now imagine the hiker can feel the slope beneath their feet.
Instead of moving randomly:
← downhill← downhillthey follow gradients.
Policy Gradient methods optimize:
using:

This is equivalent to descending an energy surface.
REINFORCE: Following the Slope
REINFORCE estimates:

Interpretation:
If an action produced good rewards:
Do more of itDo more of itIf rewards were poor:
Do less of itDo less of itThe landscape begins guiding the agent.
Actor-Critic: Explorer + Guide
Actor-Critic splits learning into two agents.
Actor
Moves through the terrain.
Critic
Estimates landscape elevation.
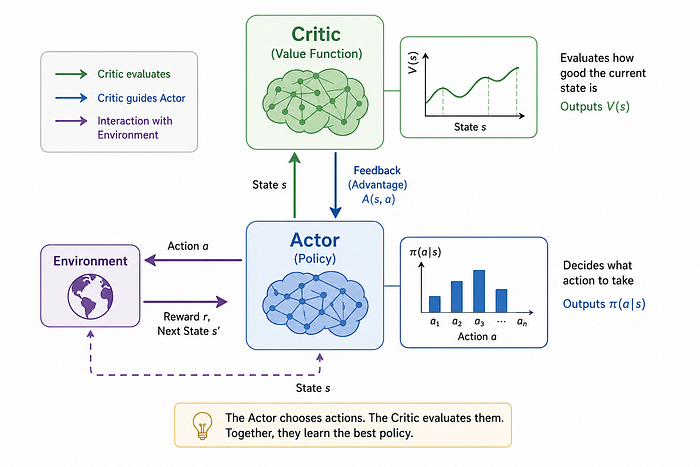
The Actor explores.
The Critic evaluates.
Together they navigate much more efficiently.
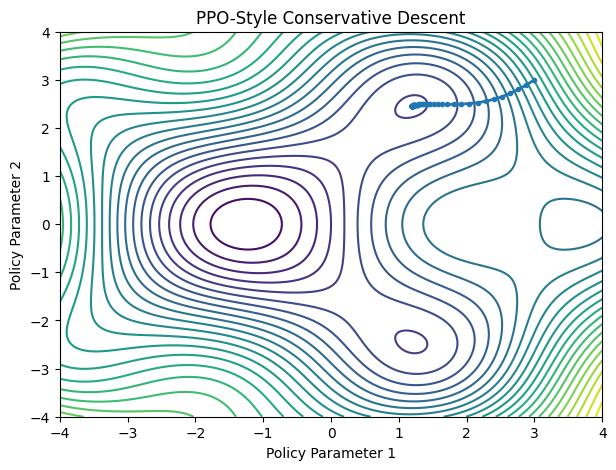
PPO: Safe Mountain Climbing
One problem with gradients:
Sometimes the agent jumps too far.
Valley
↓
JUMP!
Falls off cliffValley
↓
JUMP!
Falls off cliffPPO (Proximal Policy Optimization) introduces a trust region.
Objective:

Meaning:
Improve, but don't change too much at once.
PPO became one of the most widely used RL algorithms because it balances exploration and stability.
SAC: Adding Temperature
Soft Actor Critic introduces entropy.
Objective:

where:
is entropy.
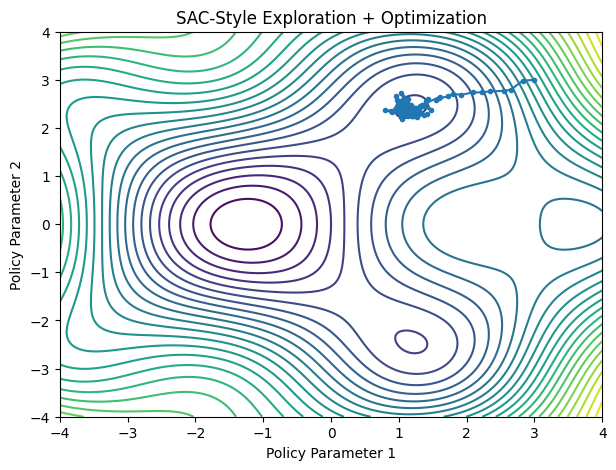
Interpretation:
Reward
+
CuriosityReward
+
CuriosityThe agent doesn't merely seek the deepest valley.
It also prefers landscapes with multiple promising paths.
This prevents premature convergence.
Creating the Landscape Visualization
Generate a synthetic reward surface:
import numpy as np
x = np.linspace(-4,4,200)
y = np.linspace(-4,4,200)
X,Y = np.meshgrid(x,y)
Z = (
np.sin(X)
* np.cos(Y)
+ 0.1*(X**2 + Y**2)
)import numpy as np
x = np.linspace(-4,4,200)
y = np.linspace(-4,4,200)
X,Y = np.meshgrid(x,y)
Z = (
np.sin(X)
* np.cos(Y)
+ 0.1*(X**2 + Y**2)
)Visualize:
import matplotlib.pyplot as plt
plt.figure(figsize=(8,6))
plt.contourf(X,Y,Z,levels=50)
plt.colorbar()
plt.title("Policy Energy Landscape")
plt.show()import matplotlib.pyplot as plt
plt.figure(figsize=(8,6))
plt.contourf(X,Y,Z,levels=50)
plt.colorbar()
plt.title("Policy Energy Landscape")
plt.show()Simulating Different Algorithms
Random Search:
path = [np.array([0,0])]
for _ in range(200):
path.append(
path[-1]
+ 0.2*np.random.randn(2)
)path = [np.array([0,0])]
for _ in range(200):
path.append(
path[-1]
+ 0.2*np.random.randn(2)
)Gradient Descent:
for _ in range(100):
gradx = ...
grady = ...
x -= 0.1*gradx
y -= 0.1*gradyfor _ in range(100):
gradx = ...
grady = ...
x -= 0.1*gradx
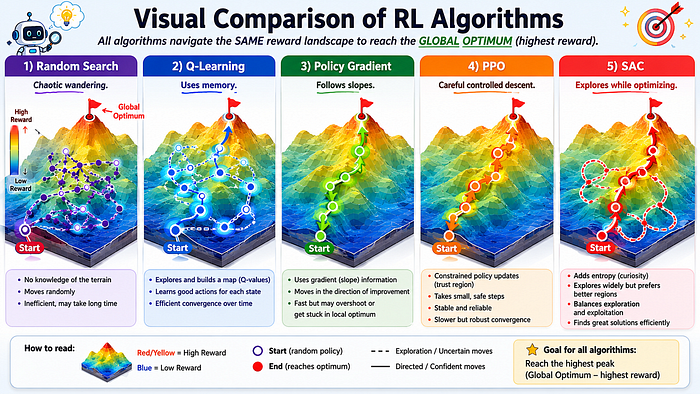
y -= 0.1*gradyOverlay trajectories on the contour map.
The resulting figure immediately reveals:
- Random Search wanders
- Q-Learning explores then exploits
- PPO descends carefully
- SAC explores broader regions
Why This Perspective Matters
Energy landscapes unify ideas from:
- Reinforcement Learning
- Statistical Physics
- Dynamical Systems
- Optimization Theory
- Deep Learning
Instead of memorizing equations, you can think:
Agent
↓
Explores Landscape
↓
Finds Better Valleys
↓
Learns Better PoliciesAgent
↓
Explores Landscape
↓
Finds Better Valleys
↓
Learns Better PoliciesThe mathematics becomes a description of movement through that landscape.
And suddenly, Reinforcement Learning feels less like abstract equations and more like watching intelligence emerge from a journey through a complex terrain.
The next time you hear terms like PPO, SAC, or Actor-Critic, imagine a traveler crossing mountains, discovering valleys, and gradually learning the shape of an unseen world.
That is Reinforcement Learning.