Imagine stepping outside on a normal afternoon and seeing five or six drones cutting across the sky at different altitudes. Not staged, not a demo, just routine traffic. One drops toward a driveway two blocks over, another holds position above a job site, something small and loud cuts past your line of sight and you lose it behind a building. It doesn't feel futuristic for very long. It starts to feel crowded.
What's odd is how much of this still assumes nothing is actively pushing back on it. Most of the systems out there behave like failure is accidental. You lose GPS, you lose link, something drifts out of tolerance, the aircraft gets conservative and tries to get out of the air. That logic makes sense if you're flying solo over an open field. It's a problem when you've got density and anything of value onboard.
You don't need to take control of a drone to break its mission. You just need to make it uncertain. That's the part that's easy to miss if you're thinking in terms of hacking instead of behavior. If the system starts doubting its inputs, it falls back to whatever its safest default is. And right now, that often means hovering until it can't or just landing where it is.
Walk that forward a bit. You've got a delivery drone coming in low between buildings, GPS already bouncing a little from reflections, link quality dipping as it passes behind structure. It doesn't take much to push that over the edge. Now it's looking for a place to set down. Not a secure pad, just ground. Parking lot, sidewalk, wherever it decides is stable enough. From there it's not really a drone problem anymore.
This isn't some exotic edge case. Urban RF is already messy. You can map dead spots just by walking a mic around a room, let alone a city block. Add intent on top of that and the system is doing exactly what it was designed to do, just in the wrong context. That's the uncomfortable part. The failure mode is compliant.
A lot of current deployments still optimize around battery and throughput. How fast can you get from A to B, how many trips per hour, how clean is the recovery path. That's fine until you accept that interference isn't rare. Then the priorities flip. Now it's about not becoming predictable under pressure. Which usually costs range, costs weight, costs time.
If you remove auto-land as a default outside controlled zones, you force a different behavior. The aircraft has to climb, create separation, and go somewhere known. That means you need those places defined ahead of time, instrumented, reachable without trusting a single signal source. Vision, inertial, pre-mapped corridors, some mix of all three. It's heavier, it burns more power, and it complicates routing. But at least you're not handing the last decision to whatever noise happens to be in the air at that moment.
The payload side is even less mature. A lot of systems still treat the cargo as something you recover with the aircraft. That assumption breaks the second the aircraft is forced down in public space. If the box opens or can be opened, that's the end of it. Locking it properly adds weight and cost and failure points of its own, especially if you need remote authentication or tamper detection that doesn't false-trigger every time the drone lands a little hard. So people skip it, or they half do it.
The part that's going to force the change probably isn't engineering. It's going to be insurance. Once there's enough volume, a few predictable losses in uncontrolled areas and the terms tighten fast. Same with regulators once something drops in the wrong place at the wrong time. At that point "return to home" doesn't mean what it used to. It can't just be a best effort path back to a GPS point that may or may not be valid anymore.
You end up designing for a worse case you don't fully control, with tighter energy margins and more states to manage, and you're still relying on sensors that degrade in exactly the environments you care about most. There's no clean version of that system. Just less exposed ones.
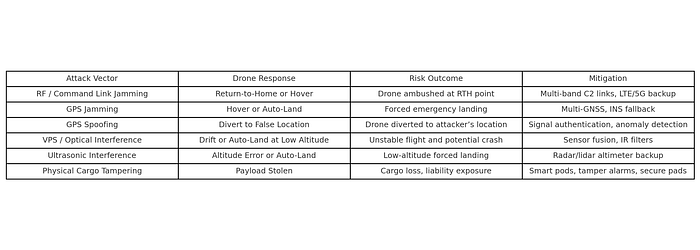
Threat Matrix: Drone Piracy Attack Vectors and Mitigations
The following matrix summarizes potential attack vectors against UAV operations, the typical drone responses, the risk outcomes, and the recommended mitigations.