

Figure 1: A freefalling cat re-orients itself through a closed cycle in its configuration space comprising repeated hula hoop motions (as shown in Figure 8) that induce a countervailing rotation of the cat's full proper frame to uphold zero net angular momentum, thus flipping the cat over. Sylvestrian (including domestic) cats (Felis Sylvestris) with their slender tail mostly roll about their "central" (transverse) plane to accomplish roll and the tail matters little to the flipover motion as as shall see; tree dwelling cats like the Marbled Cat of Borneo and also the Snow Leopard have huge, club like tails with a mass significant compared with the rest of the body and whose motions also afford pitch and yaw control (rotation in sagittal and coronal planes), particularly for the dive bombing of prey from trees.
To understand what the subject of my story today is, you simply need take a glance at my little video above. Even though it is a little inelegant and naff, it's instantly recognizable: the gymnastics of how a falling cat flips over by making a hula-hoop motion around her waist. On showing it to a few friends, their reaction was almost the same in all cases, something like, "Oh, is THAT how a falling cat flips over?!" Even the naff, primitive geometry of my video in comparison with the beauty of the ballet of a living, feeling cat evokes a delight in my friends; i guess that shows how dear the cat is to our cultures, in Germany and Australia, at least. Although i think the backward culture of the latter country could certainly do a great deal better than the appalling acts of neglect and cruelty that the culture is infamous for and that happen routinely to some of its companion animals as well as its people.
I have made the video in a freefalling, inertial frame that falls with Puss; if one imagine this happenning at home, to be in this frame you must freefall with Puss and watch her flip over to land on her feet when she clumsily falls of furniture or the like! Or you could imagine our cat friend in space, for, as a member of the Grand Starfleet of the Gandanglious Unsquidgeable Spacecats of the Seventh Senfonian System, she uses these motions constantly to re-orient herself to different work consoles as she pilots her magnificent spaceship!
I've already addressed this topic in a mainly history article, but where i do give an example of a much simpler composite system than a cat moves to re-orient itself in space to show the important principle:
Composite, isolated (i.e. not pushing against anything) systems CAN re-orient themselves in space by making cyclic changes to their shape (the relative orientation of their component parts) in a motion that still completely conserves angular momentum.
Let's begin by reprising the most important history of this problem, whose science was completely muddled by even great physicists like James Clerk Maxwell and seemed to lie utterly unnoticed by those like Leonhard Euler (famous for his pioneering work in the rotational dynamics of rigid bodies) who seemingly dwelt in the right intellectual landscape where such problems are understood. Like Maxwell, Sir George Gabriel Stokes was also a scholar of "cat turning" as the Nineteenth Century English physicists called the phenomenon, but to utterly no avail. Check out those sideburns in the portrait below. I think the problem was clearly that Sir George didn't grow them big enough!
Figure 2: Clearly Sir George thought that the path to scientific enlightenment lay in ginormous sideburns.
THE person who first clearly understood the cat's point of view was, of all people, a physiologist, the amazing Étienne-Jules Marey (1830–1904), who is famous for the development of motion photography for the study of high speed movements of animals that gave him the key insight:
First of all, the inspection of these figures [photographs of falling cats] rules out the notion that the animal imparts a rotational motion on itself by thrusting against the hands of the experimenter. [This conclusion follows] because the first frames of the two series [of photos of a falling cat] show that in the first instants of its fall, the cat as yet has no tendency to turn from one side nor the other. Its rotation only begins with the twisting of its waist.
The emphasis is mine, as it shows that this careful nonphycisist clearly knew there were no external torques acting, in contrast with even James Clerk Maxwell: the accepted "explanation" in Marey's time seems to have been that the cat pushes off whatever it falls from. The above translation is also mine, so French speakers: PLEASE go easy on me in the comments. It is taken from Marey's famous paper "Des mouvements que certains animaux exécutent pour retomber sur leurs pieds, lorsqu'ils sont précipités d'un lieu élevé" [The Movements that certain animals make to land on their feet when they have fallen from a high place] published in 1894 in Nature, with the stunning photo sequences below. His paper of the year before "Locomotion comparée chez les différents animaux" [Locomotion compared amongst different animals] is also beautiful and worth seeing, and its subtitle is "New Applications of Chronophotography". It was Marey himself who coined the word Chronophotography for the taking of a quick succession of photographs for the study of animal motion.
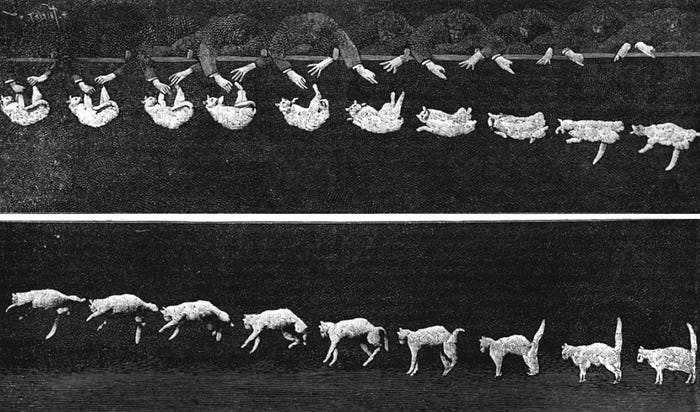
Figure 3: The amazing 1894 Chronophotography by Étienne-Jules Marey of the sequence of righting motions of a falling cat. Marey was clearly the first who understood the essence of the physics of the motion.
Figure 4: The amazing Étienne-Jules Marey, photographed by Félix Nadar, Paris, c.1880. The negative belongs to the Médiathèque de l'Architecture et du Patrimoine.
Describing a Simple Robot Cat
Okay, let's dive in deep: The following wonderful video is a great source whence to glean intuition and it deals with, essentially, a two section composite system to model the cat like my equations do below. However, as we shall see, a careful analysis does not agree with the simple arrow vector analysis of the rotation decomposition shown in the article.
Figure 5 (YouTube Movie): Intuitive Explanation of the conservation of angular momentum in the cat righting reflex. The composite body can indeed re-orient itself without violating angular momentum conservation
First some definitions, with the help of two sketches:

Figure 6: Basic Co-ordinate Definitions for the falling cat's proper frame where we imagine the cat's halves "opening" symmetrically with angle 2𝛼 relative to the proper transverse plane.
As in Figure 6 above, we define a Cartesian co-ordinate system to define the cat's proper, wherein the cat's x axis is the cat's "vertical", "y" its sideways and z its "forward" direction, so that plane y–z (x=0) is the coronal, x–z (y=0) the medial sagittal and x–y (z=0) the transverse plane. The angle between the two mechanical sections, the fore- and hinder-cat, is 2𝛼, such that each section makes an equal angle 𝛼 with the proper transverse plane.
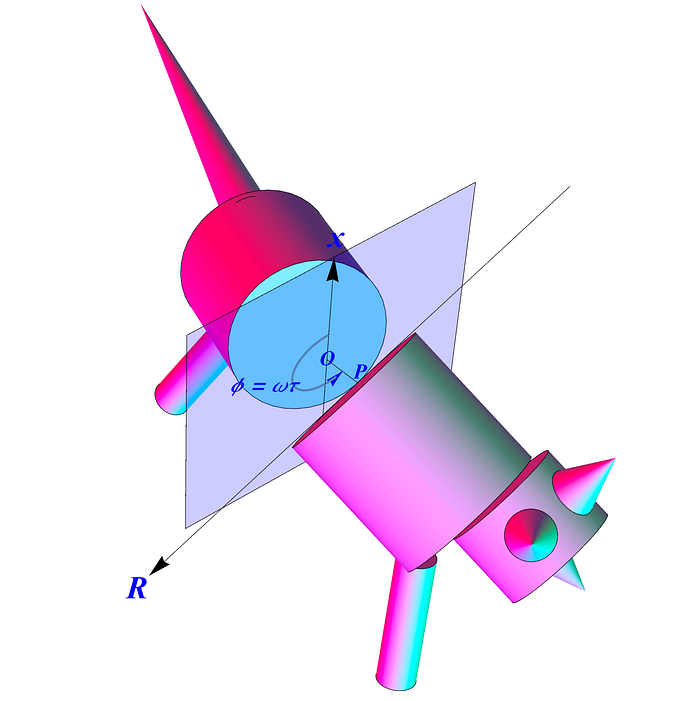
Figure 7: A uniform increase in the angle 𝜙 with time whilst each of the cat's halves remain at a constant angle 𝛼 to the proper transverse plane defines a pure "hula hoop" motion
The key to the cat's righting motion is a "hula hoop" motion, which is shown below (with the cat's proper frame held fixed). This motion has a net, nonzero angular momentum in the transverse plane; in axis terms, the angular momentum is along the cat's proper z axis. Thus, to uphold conservation of momentum when the cat begins with zero total angular momentum, the proper frame itself must rotate about the z axis in the opposite sense to the net, proper angular momentum. This countervailing spin is what flips the cat as a whole over as she falls.
Figure 8: A Cat's Shape Cycling through its Shape Space — the rotation of the proper frame that flips the cat over and which conserves angular momentum is suppressed here to allow more detailed appreciation of the hula motion. Figure 1 shows the cat's full, zero net angular momentum.
Pure Hula motion, shown in Figure 8, is defined by the cat's halves both maintaining a constant angle with the transverse plane, but the axis of the opening R in Figure 7 precesses in the transverse plane, rotating in that plane at an angular speed 𝜔𝜙 = d𝜙/dt as shown below in Figure 9.
Figure 9: A more detailed study of pure Hula Motion for two cylindrical "half cats". The angle between the two halves remains constant at 2𝛼, but the axis of rotation precesses in the transverse plane. Otherwise put: each cylinder always tilts an angle of 𝛼, but the precesses the axis of rotation. The axis shown as the arrow is the axis R in Figure 7. Note the interesting teardrop shape, shown in orange between the cylinders, of the cyclic path of each point on the outside of each cylinder.
Next, the degree of the cat's "arching" is defined by the angle 2𝛼 between the two halves, and the change of the cat's arching is defined by an angular velocity 𝜔𝛼 = d𝛼/dt.
The cat's shape, in its proper frame, is then wholly defined by the two angles (𝜙,𝛼) and its velocity through the space of shapes is fully defined by the two signed angular speeds (𝜔𝜙,𝜔𝛼).
We shall need two last quantities — the moments of inertia of the separate fore and hinder cat. We shall hereafter solely refer to two quantities If and Iₕ, defined by:

where x is the vector (x,y,z) of the Cartesian Co-ordinates, f and h stand for quantities evaluated over the fore- and hinder cat halves, and everything is evaluated for the "standard shape" where 𝜙 =𝛼=0. If and Iₕ are the fore- and hinder-cat inertia tensors, and they are homogeneous linear mappings that eat the angular velocity of each half as argument and output the angular momentum of the body with the relevant inertia tensor.
Lyrical Poetry for Describing Puss 🐈⬛💜
To describe Puss and her dynamics, i shall use spinor valued quaternion notation, which genuinely simplifies the description. One can also do it in the regular rotation group SO(3) with vector cross products but the calculations are more tedious. One of the main reasons for the quaternion convenience here is that every quantity — positions included —lives in the Lie Algebra 𝖘𝖚(2) of the rotation group's double cover SU(2), and thus transforms in the same way through the two sided action of the Lie Group on its own algebra through the adjoint representation. This was a topic of my discussion of quaternion algebra in my aerospace guidance article:
Crucially, the time derivatives are MUCH easier to calculate for quaternions owing to the simpler Rodrigues Rotation Formula in SU(2) as compared with SO(3). In SU(2), the sphere of unit quaternions, any unit quaternion 𝕦R with𝕦R²= –1fullfils Euler'' formula, exp(𝜃 𝕦)=cos(𝜃)+𝕦 sin(𝜃), EXACTLY as for the commutative field ℂ, because the extension field ℝ(𝕦) is isomorphic to ℂ as i explored in my article on extension fields and higher dimensional numbers:
Indeed, covers of Lie Groups ALL have the same Lie algebra, so that here 𝖘𝖚(2)≅𝖘𝔬(3)=Lie(SO(3))≅Lie(SU(2)), which is why we can take the simpler SU(2) quaternion approach. The Rodrigues Rotation Formula is quadratic in SO(3) and so much messier, so that doing things with quaternions is much easier than with inertia tensors and vectors. Every quantity is a Lie Algebra member and so everything — positions, inertia tensors, angular velocity two-forms — transforms by rotations in exactly the same way; we don't have to worry about tensors and whether indices are up / down / inside-out like Diana 💜R💜RRossand whatnot (settle down Selena — awww, c'mon, i've crushed bigtime on her since i was a little tot and my Mum had all her records!). In this notation, the position of a point in Puss's body is:


are an orthogonal basis for our Lie Algebra 𝖘𝖚(2) (orthogonal with respect to the Killing Form or in the Clifford Algebraic sense). The quaternion units are simply the Pauli Spin matrices multiplied by i so that 𝕚=+i 𝜎x, 𝕛 =–i 𝜎y and 𝕜=+i 𝜎z. Check the notation in anything else you read — it varies a great deal — sometimes authors use a reverse ordering to make the signs all positive (so that would be 𝕚 =+i 𝜎z, 𝕛 = +i 𝜎y and 𝕜 = +i 𝜎x) or use all negative signs (so that would be 𝕚 = –i 𝜎x, 𝕛 = –i 𝜎y and 𝕜 =– i 𝜎z). As long as one reproduces the defining algebraic properties 𝕚²=𝕛²= 𝕜² =𝕚 𝕛 𝕜 = –1 it is unimportant.
The reason for my choice is that i make fewer mistakes, because then the arrangements of +/- signs in the matrix representations are the same for the Pauli matrices as for my choice; somehow it's just easier for me, even though the multiplication by ±i between the sigmas and the quaternions is inconsistent (i.e. that both 𝕚 =+i 𝜎x and 𝕜 = +i 𝜎z whereas 𝕛 = – i 𝜎y has a minus sign). I stressed considerably over which convention to choose, but this is the one that means i am most likely to be accurate!
It is altogether acceptable for a mathematician / physicist to have different notations: a terse and pithy one for pure theoretical reasonings / proofs / fundamental understanding and public presentations as well as a separate private "calculation" notation taking account of her/his/their comprehension quirks. Even Alexander Grothendieck did this as he eased his mind into new explorations. Sir Roger Penrose's love of and sheer talent in producing magnificent diagrams drenched with and brimming with insight is legendary — see him in action twenty years ago here.
A rotation through angle 𝜃 about the axis (𝛾x, 𝛾y, 𝛾z) is effected by the unity magnitude quaternion:

and its action on the position X is the two sided, spinor map which is that given by the Adjoint Representation's action:

Therefore, the velocity of the point X as it is moved by the map is:

where [𝛺,X]=𝛺.X–X.𝛺 is the Lie Bracket.
Short exercise: Let Q∈𝔊 for a matrix Lie Group 𝔊 (like SU(2)) with Lie Algebra 𝔤 — most Lie Groups have faithful matrix representations aside from a few oddballs like the metaplectic groups. Let our Q follow a C¹ path (path with continuous first derivatives) {Q(t): t∈ℝ} with real path parameter t. Represent its time derivative as the right-translated Lie algebra member :

where 𝛺(t)∈𝔤 is a member of the group's Lie Algebra 𝔤 (by definition of the Lie algebra as the vector space of tangents to the identity) and where we use the right-translated angular velocity two-form 𝛺 as the derivative.
Now, using Q(t).Q(t)⁻¹=id, show that the time derivative of the adjoint action is:

Indeed, in the case of a non-matrix group (a metaplectic oddball), one can define the Lie Bracket in this way as the differential at the identity of the action of the Lie Group on its own algebra through the adjoint representation. One can then prove it is bilinear and antisymmetric (alternating) in both its arguments and fulfils the Jacobi Identity — which three conditions are the definition of a Lie Bracket.
The angular momentum L in 𝖘𝖚(2) about the origin of a point mass m with position X∈𝖘𝖚(2) and velocity V∈𝖘𝖚(2) is the Lie Bracket L=m [X,V]. Noting that the X moves through the spinor map X(t)=Q(t) X(0) Q(t)⁻¹, the mass's angular momentum is:

where we take heed that everything snuggled in between the Q(t)…Q(t)⁻¹ in Equation 9 is written in terms of the position before anything moves; there are heaps of Lie brackets and commas so it sure looks snuggly in there!
Exercise: Prove Equation 9, i.e. check that one can pull the Q(t) and Q(t)⁻¹ maps out of the Lie Bracket as above in Equation 9 by writing the brackets out in full.
Excercise (Representing rotational mechanics through 3 dimensional vectors and cross products): Define the vectorization operator vec: 𝖘𝖚(2) ➝ℝ³ in the obvious way:

then show that Lie Brackets in 𝖘𝖚(2) correspond to the vector cross products in ℝ³ as follows:
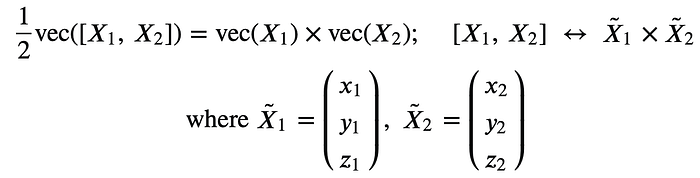
Since the Lie bracket is linear in both its arguments, we can thus calculate the linear inertia operator for a rigid body by integrating over its volume 𝒲 at t=0, before anything moves. We define, therefore, the inertia operator:

which is calculated over the rigid body before motion by means of the mass density 𝜌(X) as a function of position X.
Exercise: Use Equation 10 and Equation 12 to show that the inertia operator can be written as a linear matrix operation with the angular velocity expressed as the wonted vector in ℝ³ as follows:

in other words, the inertia tensor and inertia matrices can be written:
and we have come back to Equation 1.
Breathing Life Into Puss 🐈⬛💜
Now we represent Puss as the two separate rigid bodies cycling their shape (their relative spatial relationships) as in all the figures above. Let's repeat Figure 7 to keep axes and spatial relationships within easy reach:

Figure 10: Breathing life into Puss. The hula motion is made by precessing 𝜙 at some uniform rate 𝜔 t, with Puss contracting her torso muscles in a wave that precesses around her waist at angular speed 𝜔 to make this motion.
Relative to Puss's proper frame, i.e. one in the figures above (Figure 10) where we fall and flipover with Puss, her forward and hinder halves undergo separate rotations as she makes her hula motion. The proper frame itself undergoes a global rotation P(t) to conserve angular momentum, so, if Qf(t) and Qh(t) are the forward and hinder cat's rotations relative to the proper frame in Figure 10, then their rotations relative to an inertial frame falling with the cat are P(t) Qf(t) and P(t) Qh(t), so that Puss's total angular momentum is:

where the forward and hinder half angular velocities relative to the inertial frame are:
where the fi and hi subscripts stand for inertial frame quantities and the angular velocity 𝛺₀ of the proper frame relative to an inertial, falling frame is defined by:

It is common to both halves, where 𝛺₀ is the flipover angular velocity Lie Algebra member that we must find.
When Equation 15 is substituted into Equation 14 and set to nought, we get the crucial description: the angular momentum conservation condition for the two section cat.

Here Icat is the inertia operator for Puss's whole body, evaluated when she is not arching her body, i.e. when 𝛼=0. We must now work out the two angular velocities 𝛺f and 𝛺h relative to the proper frame of Figure 10. Thus we must work out:

The rotations of the forward and hinder cat's halves can be worked out by observing that both undergo a rotation about the axis R in the Figure 7 in the direction sin 𝜙 𝕚 — cos 𝜙 𝕛 ; the forward half tipping clockwise an angle 𝛼R about th axis, the hinder half tipping anticlockwise an angle 𝛼R so that he cat "opens" by an angle 2 𝛼.
The hula motion is then made by precessing 𝜙 at some uniform rate 𝜔 t, with Puss asymmetrically contracting a sector of her torso muscles in a wave that precesses around her waist at angular speed 𝜔 to make this motion.
The rotation operators for the forward and hinder halves are then:

so that, on evaluating Eqution 18 with Equation 19 and substituting into the zero angular momentum condition of Equation 17, we at last find (writing our inertia operators as linear operators acting from the left:

so that:

as our Queen constant angular momentum equation for Puss when she begins her fall without rotation. Phew! That was quite a deal of symbol ballet, don't you think?!
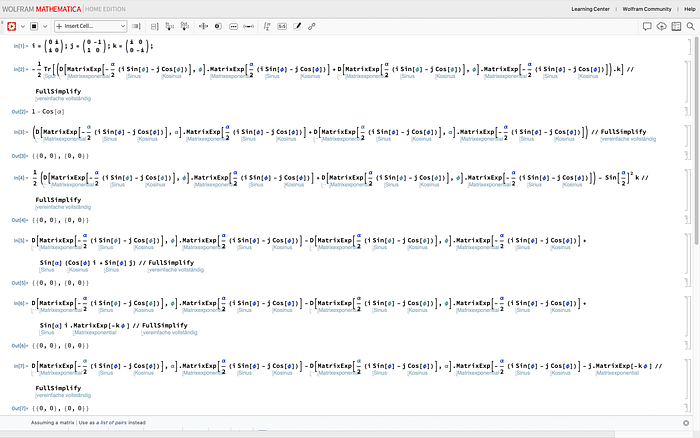
Figure 11: Mathematica, or an equivalent automated symbolic manipulator such as Sage or Maple, is essential for any serious symbolic exploration, allowing one to keep electronic notebook records of one's calculations and update them as needed. Many freeware packages are available for more specialized calculations, such as Cadabra for elegant relief of tensor nightmares, GAP for group theoretical calculations and Isabelle for automated verification mathematical proofs and logical inferences have become my gotos in recent years.
Because everything is linear, and the 𝛼=0 inertia operators are linear and constant (pertaining to the relaxed, 𝛼=0 cat), we can simplify and integrate as follows, in the adjoint representation, i.e. in terms of the three dimensional vectors of co-efficients of the pure quaternions. Since all of our equations live in the Lie Algebra 𝖘𝖚(2) of the unit quaternions SU(2), they are all three-dimensional, pure quaternions (zero real part). Thus, writing our quest 𝛺₀=(𝜔x 𝕚+ 𝜔y 𝕛 + 𝜔z 𝕜), we get the linear, homogeneous system:

Exercise: (Not for the feint of heart, ADHD weirdos like Selena Ballerina, or those with better things to do with their time which is almost everybody, i.e. this is not an insight yielding exercise): Note that we'd have gotten exactly the same result if we'd have done all our calculations in SO(3). Repeat the above inferences in the 3×3 real-coefficient matrix rotation group SO(3).
First Intuitions
Already we can glean a great deal of intuition from this equation before we work out the inertia operators in detail.
If the inertia operators for Puss's forward and hinder halves are the same, then the right hand side of Equation 21 vanishes. We are then left with the very simple equation, since the whole cat inertia operator is nonsingular. Inertial tensors for real rigid bodies are always nonsingular, since none of the eigenvalues of the inertia tensor, which are the scalar moments of inertia about Puss's principal axes, are nought:

The a=sin²(𝛼/2) term is the coefficient of the linear-in-angular velocity term 2 a 𝜔×x in the Euler-Rodrigues Equation. This defines the compensatory flipover angular velocity in the simple "vector analysis" explanation given in the YouTube video. It can readily be seen that simply summing angular velocity vectors doesn't work like shown in the video, and the reason is that we're not summing angular velocities, we are transforming two-forms between relatively rotating frames, such that the full time derivative in the equivalent vector picture transforms according to:

One of the myths that is often promulgated, even amongst physicists, is that a domestic / Sylvestrian cat (Felis Syvestris) uses their tail to effect the flipover. However, my own observation of my own adored tailless companion Freyja when she lost her tail in a road accident was that her righting reflex was almost totally unchanged. Indeed, Equation 21 explains this intuitively: most of the flipover effect comes directly from the sin²(𝛼/2) term in Equation 21 and the effects of the rest of the cat — the two halves — tend to oppose one another and, moreover, beget yaw 𝕚R ad pitch 𝕛R trms. The main effect, the sin²(𝛼R/2 dₜ𝜙R 𝕜 trm in Equation 21, is independent of the cat's symmetry or otherwise. The simulation in the video of the tailless cat below was made using the exact equations to be derived in the next section, but nonetheless show our tailless cat's righting ability to be VERY much comparable to that of a cat with a tail.
Figure 12: "Freyja", my adorable, crazy tailless companion for 19 years had forward and hinder inertia tensors that were roughly equal, like symmetric cat motion described by Equation 23. Nonethess, it made very little difference to her ability to make the righting reflex and flipover in the time it would take her to fall 40cm off the bed she had fallen off — including the response time to wake up!
Note the sin²(𝛼/2) term in Equation 23 is quadratic in 𝛼, meaning intuitively that Puss must arch her body quite considerably to achieve a flipover effect that is effective. Indeed, 𝛼=45º is not unrealistic and quite consistent with what i saw when my clumsy Freyja would roll of the bed when she drifted off to sleep. The simulation in Figure 12 is ALMOST unchanged if the right hand side of Equation 21 is simply set to nought and the approximate Equation 23 alone governs the motion.
But not quite! There's a fascinating little subtlety.
You need to look carefully at Figure 12, where i made Freyja flipover exactly one full turn, i.e. her proper frame rolls over exactly 2𝜋 radians about the horizontal z axis. I also used linear momentum conservation equations as well to keep the center of mass at a constant position. But watch carefully when the flipover is done. When the video repeats, you can see that Freyja has undergone an ever so slight yaw motion about a vertical relative to when her flipover began. She stops, and then you see her yaw about 10 degrees anticlockwise looking down on her from above to go back to the orientation wherein she began. This yaw is the effect of the 𝕚 terms on the right of Equation 21!
Most interesting!

Figure 13: "Oh Selena, You Know I'm Camera Shy!" My darling little cat Freyja just after her accident (hence her shaven hinder leg) and miraculous survival. She lived another fifteen years, and she often fell off this very bed. Her righting reflex remained faultless, her lack of tail notwithstanding and even though the fall was only about 40cm
Seeking the Exact Equtions for Two Section Puss!

Figure 14: Another view of my tailless but still amazingly acrobatic Freyja 2003–2022, being less coy. She was one of the great loves of my life and beloved friend. How i miss her tender greeting chirps — she was SOOO demanding, talked constantly and often ended up sleeping on my pillow draped over my scalp! I guess the head is a warm part of the body!
To find the exact equations, we must work out the 3×3 matrix, which i call the flipover transfer matrix 𝞢 (it makes more sense to call it "phi" for "flipover"" but that might confuse it with the angular co-ordinate 𝜙R, so let' make it an "s" sound instead — somehow i am thinking of how my fs sounded when i lost my first front tooth)!

So now i head to Mathematica and define Puss's Shape:
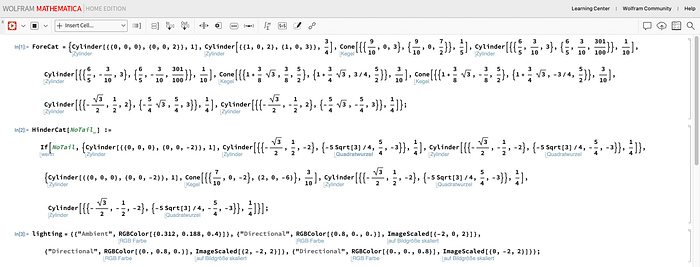
Figure 15: Defining Puss in Mathematica. For Freyja without a tail, i invoke HinderCat[True], otherwise HinderCat[False] gives a cat with her tail!
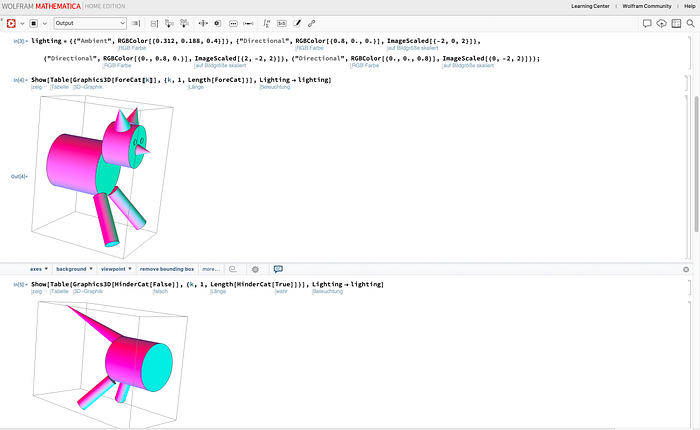
Figure 16: Now i plot everything to debug my cat creation code
and with my code i calculate the inertia tensors of Puss's forward and hinder halves, as well as the flipover transfer matrix 𝞢.
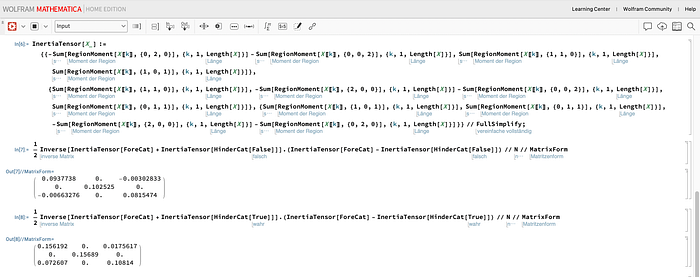
Figure 17: Inertia Tensor definition and flipover transfer matrix calculations for Freyja and for a cat with a tail
The flipover transfer matrix calculations are interesting, as they explain the observations of the last section. Firstly, the transfer matrix is small, namely, approximately one tenth of the identity matrix. Witness that the flipover transfer matrix is the inverse of the whole cat's inertia tensor left multiplying the difference between the two half inertia tensors, so that it is dimensionless and moreover, id/10 means a transfer matrix that says that only about one tenth of Puss's angular velocity is transferred over to the left hand side of Equation 21 and Equation 22.
This means that our approximation of Equation 23, which says that the flipover angular velocity is a pure roll of magnitude sin²(𝛼R/2 times the hula angular velocity, is a good one. Moreover, let's assume the models i have used in all the cat videos i have made, to wit, that the cat's arching angle 𝛼 varies with time like:

The integrals on the right hand side of Equation 22 can be worked out approximately using the linear approximation sin𝛼≈𝛼, which holds pretty well up to 𝛼≈𝜋/4 radian (sin 𝜋/4 = 1/√2≈0.71; 𝜋/4 ≈0.79), thus for the videos of this article. The two quantities on the right hand side of Equation 22 become, in this approximation:
Figure 18: Integral of the top element of the right hand side of Equation 22, the only nonzero element. Note its strong peak at one complete hula cycle per flipover (𝜔=2𝜋).
The integrals can also be done exactly in terms of Bessel functions in the case where 𝜔 is an integral multiple of 2𝜋 — in other words, Puss makes a whole number of hula hoop twists throughout the motions, that the results agree with the above, namely, that the 𝕛 term on the right of Equation 21 and Equation 22 vanishes, and the 𝕚 term is maximal and positive, being 𝜋 𝛼 radians, when 𝜔=2𝜋, i.e. Puss makes one hula-hoop whilst executing the 𝛼 schedule in Equation 26.
To simulate Puss at any time t, we must numerically integrate the Equation 22; since the flipover transfer matrix is constant in Equation 25, this is a simple numerical integral evaluation, one is not dealing with noncommuting products in a Lie Algebra, a situation which would call for the solution of the Wei-Norman equations. This is how i made my animations.
In closing, let's look again at Figure 17, when the right hand side of Equation 22 is equal to (𝜃(t),0,0)ᵀ, given that its time variation is of the form that we have just discovered through Equation 27, where 𝜃(t) is maximal at 𝜋 radians per flipover. Element (1,1) (top left) in the transfer matrix is 0.094 for Puss with tail, considerably less than that for tailless Frejya, whose (1,1) value is 0.16. This is because the forward and hinder inertia tensors are much closer to being equal in Puss's case. This is the reason why you can see the small yaw for Freyja after her flipover in Figure 12, whereas Puss in Figure 1 returns almost exactly to her original orientation after a full flipover. Also take heed of the element (3,1) in both matrices in Figure 17. This is the feedforward of the x-twist 𝜃R(t) on the righ hand side of Equation 22. For Freyja, it's positive and gives a boost to her flipover. For Puss-with-tail, it's negative and so actually detracts slightly from the flipover. This can be seen in the "race" between the two simulations below in Figure 19.
Figure 19: "On Your Marks, Get Set, Go!" May the Flippiest Feline win! Oh, it's tail-less Freyja!!!
Lastly, for completeness, i included provision for a rotation operator and a pure translation in my definition of the cat geometry in Mathematica as shown in Figure 20 below. This lets me animate Freyja and Puss and simulate their motions as defined by the equations of this article.
Figure 20: …. And later on i broaden my definitions, allowing for a rotation operator R and a translation through the vector v so that i can flip Puss and translate her center of mass to create my movies of her true flipover motion.
Of course, i also had to derive an equation for the translational motion of the two halves to hold their total center of mass steady relative to the freefalling frame, in accordance with Newton's sublime first law.
I'll leave that one as an exercise!
Which reminds me of the central theme of my article on this amazing law …
… and that is that Newton's First defines and makes rigorous the notion of an equivalence class of inertial motions. It is commonly stated in physics texts and lectures the world over that Maxwell's electrodynamics and General Relativity were the first Gauge Theories that inspired the standard model of particle physics. CATEGORICALLY NOT TRUE! The first was Newtonian mechanics, and no-one stated it better than Sir Isaac Grumblebum himself:
Every object perseveres in its state of rest, or of uniform motion in a right line, except insofar as it is compelled to change that state by forces impressed thereon.
as given, as his statement of the exalted first law in Latin, in his 1687 Principia. In other words, his laws of motion are invariant with respect to a change of inertial frame. The same applies for Euler's rotational dynamics. The reference frame is a redundant gauge — meaning that Newton's and Euler's laws are invariant with respect to any transformation from their gauge group — in this case, the Euclidean group of three dimensional isometries. Changes in orientation and position can be quotiented away from our considerations.
It's fitting therefore to close with a mention of a proceedings of masterful works on the topic of the cat's righting reflex, most notably Richard Montgomery's 1993 "Gauge Theory of the Falling Cat". Montgomery's article in this proceedings, as well as Michael Enos's "On an optimal control problem on SO(3)×SO(3) and the falling cat". Both these treat the space of shapes of the cat's orientation in space, represented from the rotation operator from SO(3) that defines the orientation, as a gauge field on the cat's configuration space, which is SO(3)×SO(3). Here the first operator defines the cat's overall orientation, it is none other than our P(t) operator in Equation 14, Equation 15 and Equation 16, treated as the gauge field. The second SO(3) operator is the relative orientation between the forward and hinder cat halves.
What's new in the present model of Montgomery and Enos and all models of composite systems comprising relatively moving parts is that the gauge theory becomes a full blown local gauge symmetry, with the overall orientation as a gauge field on the space of shapes (deformable relative spatial relationships between parts), as opposed to the global gauge that governs single rigid bodies in Newton's and Euler's mechanics — a rigid body's orientation in the absence of net external torque is fixed.
And, in this view, our Equation 24, familiar from an undergraduate Eulerian rigid body dynamics course, is none other than the gauge covariant derivative.
As quoth OIivia from the Twelfth Night — Most Wonderful!

Afterword: A Tribute To My Darling Freyja
I have to mention my heartfelt tribute to my darling companion Freyja, my friend for nineteen years.
She was there throughout my former partner's terribly difficult pregnancy with our daughter, when my former partner became so sick and we didn't know whether our daughter would make it into the world. She was there when our darling daughter came into the world in 2006 and was one of our daughter's first experiences of another mind and consciousness.
She was there when my Mum in Law Lois died before she got to see her beautiful granddaughter celebrate her first birthday.
She was there when our sublime son came into the world. She was there whilst our children grew and went to school. For all of the joys and trials we felt as new parents, all of the joys and trials our children felt as they explored this new world around them and felt delight and anguish in working out what it all meant.
Freyja was there, always greeting us with a little chirp and a squeaky meow, purring loudly as she rubbed up against us, appreciating the love we gave her. And we are so thankful for the love and joy you gave us, Freyja. It's hard to put into words how much a part of all our lives you have been.
So now we must say goodbye to this most beautiful creature who has brought us both so much joy, and seen so much of our lives together. Again, i hardly know how to stop the tears. I can't really think of a relationship with another sentient being that i have had in my adult life that did not turn out, to my despair and dismay, to be purely, emptily transactional, whether humans mined me for financial resources, or sex, or status in the days long gone when i was a respected scientist. Freyja was just there, always loving.
Farewell Freyja, our darling friend of 19 years. One can't put into words how much joy you brought us all in that time. Whether life brought joy or hardship, you were there. We'll always remember the little chirp you always greeted us with. Thank you, my love. It's so hard to say goodbye. 💜